Variational Auto-Encoder (VAE)#
In this tutorial, we will build a *variational* autoencoder for MNIST.
Variational Auto-Encoders (VAE) were introduced in:
Kingma et al.: Auto-Encoding Variational Bayes (2013)
Background of VAEs:
variational: Motivation for VAEs was to perform Variational Inference for high-dimensional continuous latent variables
Variational Inference: Approximation for Bayesian Inference to compute the posterior probability distribution \(p(z|x)\) of a latent variable \(z\) given an observed variable \(x\)
therfore, VAEs are firmly grounded in probability theory
Auto-Encoders: VAEs also compress an input to a latent representation via a Encoder, and try to reconstruct the original input from it with a Decoder
Differences to non-variational Auto-Encoders:
instead of directly predicting the latent representation and the reconstruction, the encoder and decoder output parameters for a probability distribution
therefore, we need to sample latent representations from the distribution predicted by the encoder, and take the expectation over the decoder output
VAEs have a prior belief about the distribution \(p(z)\) of the latent representation \(z\) - usually the standard normal distribution \(\mathcal{N}(0,1)\)
this results in including a Kullback Leibler Divergence loss term during training
contrary to non-variational Auto-Encoders, VAEs can be used as generative models
we just need to sample a new latent representation from \(p(z)\) and the decoder will provide the likelihood \(p(x|z)\) to sample new data points (e.g., images) from
A VAE for MNIST#
Show code cell content
import torch
import torch.nn as nn
import numpy as np
import matplotlib.pyplot as plt
import pandas as pd
import seaborn as sns
from tqdm import tqdm, trange
from sklearn.manifold import TSNE
from torch.utils.data import DataLoader
from torch.optim import Adam
from torchvision.datasets import MNIST
from torchvision.transforms.v2 import ToTensor, Normalize, Compose, ToImage, ToDtype
from torch.nn.functional import sigmoid
from pyhere import here
np.random.seed(19)
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# load the dataset with help from torchvision
transform = Compose([
# formerly used ToTensor, which is decaprecated now
# transforms images to torchvision.tv_tensors_Image
ToImage(),
# with scale=True, scales pixel intensities from [0,255] to [0.0,1.0]
ToDtype(torch.float32, scale=True),
# could normalize the pixel intensity value to overall mean and std of train set
# Normalize([0.1307], [0.3081]),
])
data_path = here("data")
artifacts_path = here("artifacts")
models_path = here("artifacts/models/")
models_path.mkdir(parents=True, exist_ok=True)
vae_path = models_path / "vae.pt"
train_ds = MNIST(data_path, train=True, download=True, transform=transform)
test_ds = MNIST(data_path, train=False, download=True, transform=transform)
class Encoder(nn.Module):
def __init__(self, n_latent=2, *args, **kwargs):
"""Our Encoder: compresses the input image to a low-dimensional representation."""
super().__init__(*args, **kwargs)
# how many dimensions our latent space has
self.n_latent = n_latent
self.conv = nn.Sequential(
# shape: (N,1,28,28)
nn.Conv2d(in_channels=1, out_channels=8, kernel_size=(5,5), padding=2),
# shape: (N,8,28,28)
nn.MaxPool2d((2,2)),
# shape: (N,8,14,14)
# batch norms will help to stabilize and speed up training
nn.BatchNorm2d(8),
nn.ReLU(),
# shape: (N,8,14,14)
nn.Conv2d(in_channels=8, out_channels=8, kernel_size=(5,5), padding=2),
# shape: (N,8,14,14)
nn.MaxPool2d((2,2)),
nn.BatchNorm2d(8),
# shape: (N,8,7,7)
nn.ReLU(),
# shape: (N,8,7,7)
# nn.Flatten(),
)
# predicts mean
self.linear_mu = nn.Sequential(
# shape: (N,392)
nn.Linear(392, 64),
nn.BatchNorm1d(64),
nn.ReLU(),
nn.Linear(64, self.n_latent)
# no activation function!
)
# predicts logarithmic variance
self.linear_logvar = nn.Sequential(
# shape: (N,392)
nn.Linear(392, 64),
nn.BatchNorm1d(64),
nn.ReLU(),
nn.Linear(64, self.n_latent)
# no activation function here!
)
def forward(self, x: torch.Tensor):
x = self.conv(x)
x = x.flatten(start_dim=1)
mu = self.linear_mu(x)
logvar = self.linear_logvar(x)
return mu, logvar
class Decoder(nn.Module):
def __init__(self, n_latent=2, *args, **kwargs):
"""Our Decoder: acts inversely to the encoder and decompresses the latent representation back into an image."""
super().__init__(*args, **kwargs)
self.n_latent = n_latent
self.linear = nn.Sequential(
nn.Linear(self.n_latent, 64),
nn.BatchNorm1d(64),
nn.ReLU(),
nn.Linear(64, 392),
nn.BatchNorm1d(392),
nn.ReLU(),
)
self.deconv = nn.Sequential(
nn.ConvTranspose2d(8, 8, (5,5), padding=2, stride=2, output_padding=1),
nn.BatchNorm2d(8),
nn.ReLU(),
# output_padding does not actually add 0s around the output, just increases the size
nn.ConvTranspose2d(8, 1, (5,5), padding=2, stride=2, output_padding=1),
# don't apply sigmoid to return logits
)
def forward(self, x: torch.Tensor):
# input shape (N, 10)
x = self.linear(x)
# reshape x to the right dimensions
x = x.unflatten(1, (8,7,7))
# transposed convolution
x = self.deconv(x)
return x
class VAE(nn.Module):
def __init__(self, encoder_kwargs=None, decoder_kwargs=None, *args, **kwargs):
super().__init__(*args, **kwargs)
encoder_kwargs = dict() if encoder_kwargs is None else encoder_kwargs
decoder_kwargs = dict() if decoder_kwargs is None else decoder_kwargs
self.encoder = Encoder(**encoder_kwargs)
self.decoder = Decoder(**decoder_kwargs)
def sample(self, mu, logvar):
# get standard deviation
sigma = torch.exp(0.5 * logvar)
# reparameterization trick: neither mu nor sigma is used for sampling
noise = torch.randn_like(mu)
z = mu + sigma * noise
return z
def forward(self, x, mc_samples: int=1):
mu, logvar = self.encoder(x)
# take expectation over mc_samples latent samples
zs = [self.sample(mu, logvar) for _ in range(mc_samples)]
logits = [self.decoder(z) for z in zs]
zs = torch.stack(zs, dim=1)
logits = torch.stack(logits, dim=1)
expect = logits.mean(dim=1)
# return shape: [batch, sample, channel, height, width]
return expect, logits, zs, mu, logvar
Training#
this is the objective function from the paper:

\(J\) is the number of latent dimensions, \(L\) is the number of Monte Carlo samples
left term: Kullback Leibler Divergence with Standard Normal Distribution
for a proof of the Kullback Leibler Divergence for Normal Distributions, see: https://statproofbook.github.io/P/norm-kl.html
the parameters \(\mu\) and \(\sigma\) are produced by our Encoder
we will compute the Kullback Leibler Divergence loss term
loss_kldusing the predicted parameters
right term: ~~reconstruction loss~~ likelihood of observing x given a latent representation z
this is implemented by our Decoder - but how?
our Decoder produces logits that can be transformed into probabilities \(p\) for each pixel
we interprete those as parameters for a Bernoulli Distribution for each pixel: how likely is it, that this pixel is “on”, given the latent representation?
we can use the Binary Cross Entropy (BCE) loss for this term (with logits from our decoder)
important: while the given objective function is maximized, we will minimize our loss function
from torch.nn import MSELoss
from torch.nn import BCELoss, BCEWithLogitsLoss
from torch.optim import Adam
def train_vae(model: nn.Module, train_dl: DataLoader, n_epochs: int = 5, lr=1e-4, log_interval=10, beta=1, mc_samples=2, device="cpu"):
model.train()
model.to(device)
loss_log = list()
# criterion_reco = MSELoss()
criterion_bce = BCEWithLogitsLoss(reduction="sum")
optimizer = Adam(model.parameters(), lr=lr)
with tqdm(total=n_epochs * len(train_dl)) as pbar:
for epoch in range(n_epochs):
pbar.set_description(f"{epoch}/{n_epochs}")
for i, (x, _) in enumerate(train_dl):
optimizer.zero_grad()
x = x.to(device)
logits, _, _, mu, logvar = model(x, mc_samples=mc_samples)
# binary cross entropy as bernoulli likelihood given by decoder params
loss_bce = criterion_bce(logits, x)
# the equation below directly results from the KLD between the latent distribution and N(0,1)
loss_kld = -0.5 * (1 + logvar - mu.pow(2) - logvar.exp()).sum()
loss = loss_bce + beta * loss_kld
loss.backward()
if i % log_interval == 0:
loss_log.append(loss.item())
optimizer.step()
pbar.update()
return loss_log
from torch.utils.data import DataLoader
train_dl = DataLoader(train_ds, batch_size=32, shuffle=True)
test_dl = DataLoader(test_ds, batch_size=32)
BETA = 1
N_EPOCHS = 10
MC_SAMPLES = 3
model = VAE()
train_loss = train_vae(model, train_dl, n_epochs=N_EPOCHS, beta=BETA, device=device, mc_samples=MC_SAMPLES)
9/10: 100%|██████████| 18750/18750 [02:08<00:00, 146.24it/s]
SAVE_MODEL = True
if SAVE_MODEL:
torch.save(model.state_dict(), model_path)
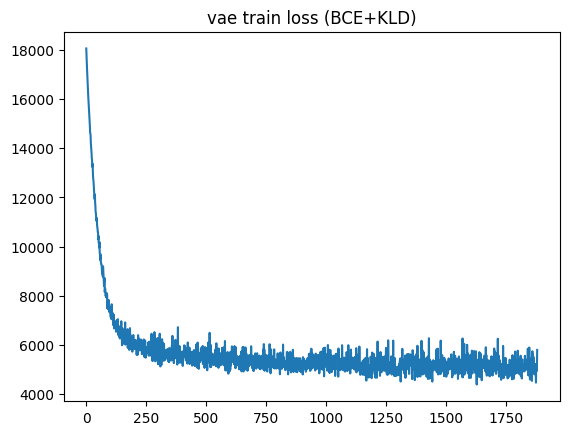
plt.plot(train_loss)
plt.title("vae train loss (BCE+KLD)");
n_test = 1000
x_test = torch.stack([test_ds[i][0] for i in range(n_test)]).to(device)
y_test = torch.tensor([test_ds[i][1] for i in range(n_test)])
model.eval()
with torch.no_grad():
logits, logits_all, z_test, mu_test, logvar_test = model(x_test, mc_samples = MC_SAMPLES)
x_hat = torch.nn.functional.sigmoid(logits).cpu()
plt.figure(figsize=(16,4))
n_plot = 10
for i, x in enumerate(x_hat[:n_plot]):
plt.subplot(1, n_plot, i+1)
plt.imshow(x.squeeze())
plt.title(y_test[i].item())
plt.axis(False)

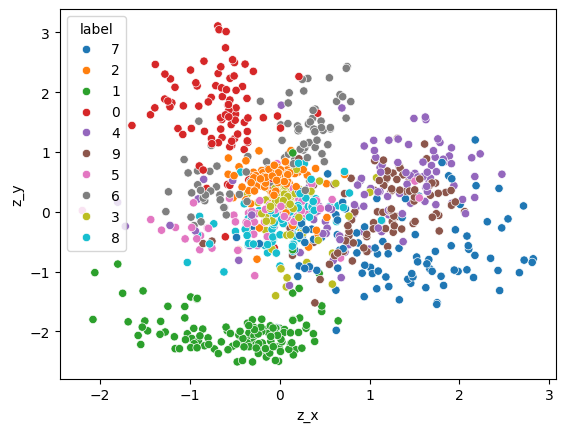
z_xy = z_test.cpu().mean(dim=1)
z_df = pd.DataFrame({
"z_x": z_xy[:, 0],
"z_y": z_xy[:, 1],
"label": y_test.numpy().astype(str)
})
sns.scatterplot(z_df, x="z_x", y="z_y", hue="label")
<Axes: xlabel='z_x', ylabel='z_y'>
Generate new Images!#
n_gen = 20
xx, yy = np.meshgrid(np.linspace(-3, 3, n_gen), np.linspace(-3, 3, n_gen))
# reverse the order of y coordinates - you will thank me later ;)
yy = yy[::-1]
z_gen = torch.from_numpy(np.stack([xx, yy], axis=2)).reshape(-1, 2).float()
z_gen.shape
plt.scatter(z_gen[:,0], z_gen[:, 1])
plt.title("z probe grid");
with torch.no_grad():
x_gen = sigmoid(model.decoder(z_gen.to(device)))
# reshape back into row/column format
x_gen = x_gen.cpu().reshape(n_gen, n_gen, 1, 28, 28)
x_gen.shape
torch.Size([20, 20, 1, 28, 28])
fig, axs = plt.subplots(n_gen, n_gen, figsize=(12,12))
for col in range(n_gen):
for row in range(n_gen):
# matplotlib row order starts from the top
# good thing that we inversed the y coordinate order, right? :D
axs[row, col].imshow(x_gen[row, col].squeeze())
axs[row, col].axis(False)
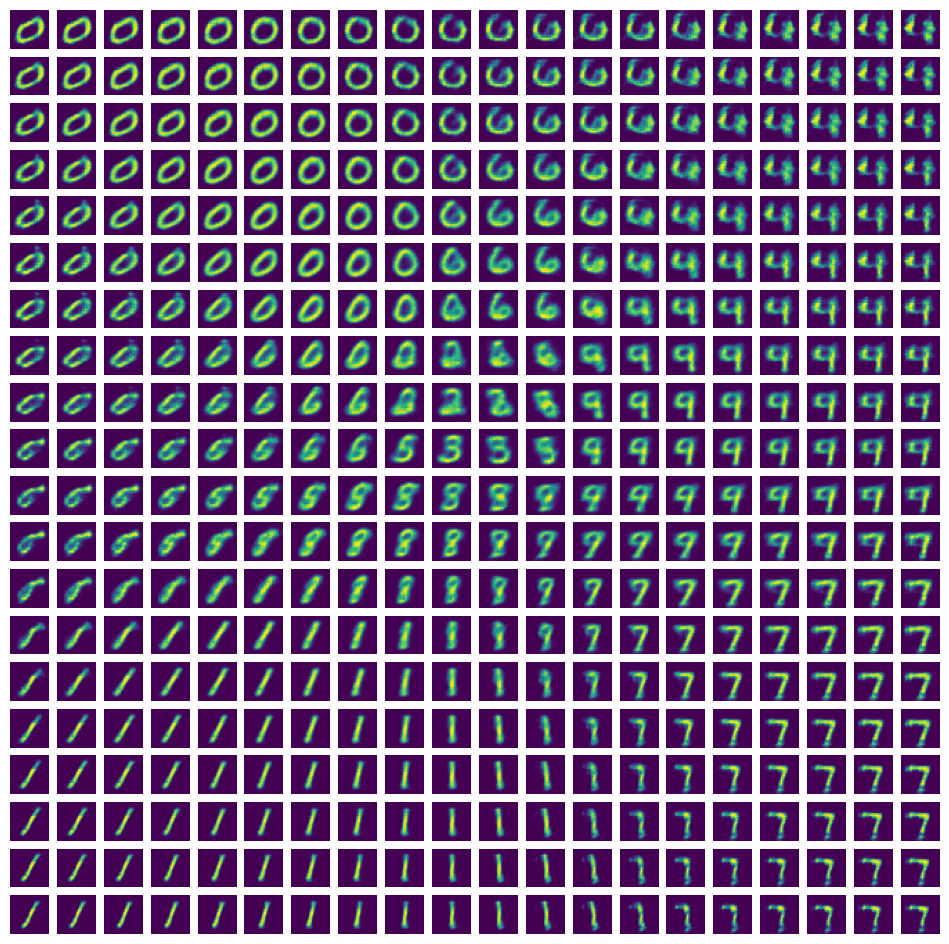
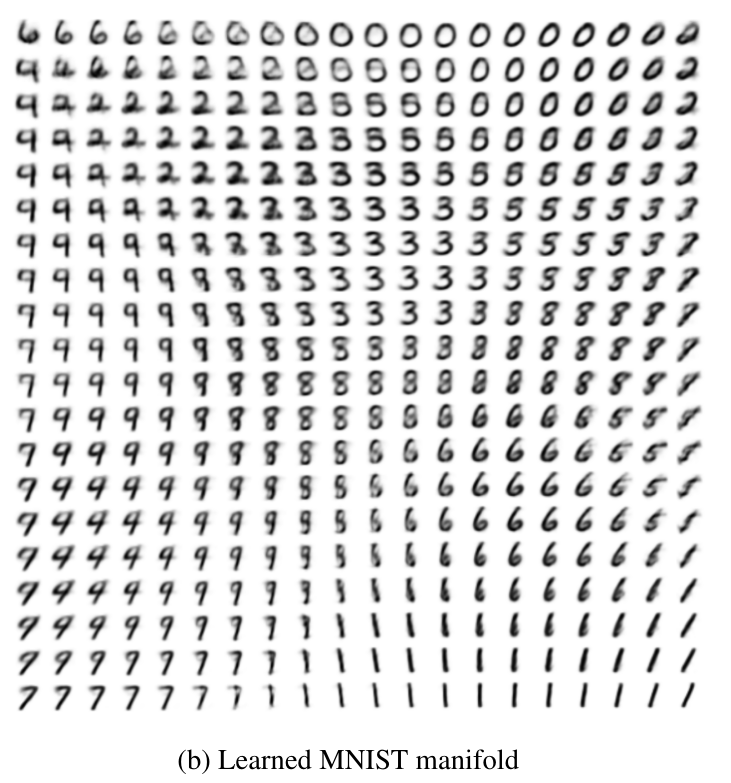
For comparison, this is the figure from the original paper by Kingma et al.:
Bookmarks#
https://lilianweng.github.io/posts/2018-08-12-vae/
amazing overview on Autoencoders in general with nice figures